Invalidska kolica. Crtež, opis. Opis montaže i crteži pogona za invalidska kolica
Jednostavan električni pogon koji postaje običan invalidska kolica samohodni, razvijen u malom preduzeću "Elektromobil". Uređaj je prilično jednostavan; Može se napraviti čak iu stanu, bez upotrebe posebnih alata i materijala. Kao osnovna korištena su najčešća i najpouzdanija invalidska kolica - kolica modela "400" proizvedena u tvornici Stavrovsky, iako se bilo koja druga mogu nadograditi na ovaj način.

Kao pogonska jedinica preporučuje se elektromotor ME272 s naponom od 12 V i snagom od 100 W (od ventilatora automobila Zhiguli). Moment sa osovine motora se prenosi na točak pomoću jednostavnog frikcionog valjka. Pričvršćuje se na osovinu motora klinom i posebnom produženom maticom. Najbolji materijal za valjak - liveno gvožđe, jer ima dobra svojstva trenja. Treba napomenuti da su valjak i posebna matica jedini okrenuti dijelovi cijele konstrukcije.
Elektromotor je pričvršćen sa tri M6 navojne šipke na međuploči. A to je zauzvrat pričvršćeno na okvir pomoću M8 vijka.
Frikcijski valjak je pritisnut uz točak pomoću mehanizma desne parkirne kočnice, tako da se njegova ručka pretvara u ručicu za upravljanje kvačilom. Modifikacija mehanizma se sastoji od uklanjanja plastične kočione pločice i odsijecanja dijela poluge na kojoj je pričvršćena. Na udaljenosti od 3...5 mm od ruba reza, u polugu je urezan okomiti žlijeb dimenzija 4,2x6 mm kroz koji se provlači vijak M4 koji povezuje polugu i međuploču - osnovu elektromotor.
Nekadašnji kočioni mehanizam treba podesiti tako da kada pritisnete ručicu (dok se ne zaključa) valjak se utisne u gumu za 5...7 mm, a kada se poluga pomeri u drugi krajnji položaj, izađe van. kontakta sa točkom.
Da biste ugradili steznu jedinicu u okvir stolice, potrebno je odrezati cijev za pričvršćivanje sjedišta. To neće utjecati na čvrstoću stolice, ali budući da se takav postupak obično izvodi rijetko, malo je vjerovatno da će ove poteškoće biti od fundamentalnog značaja.
Auto akumulator tipa 6ST55 ugrađen je iza sjedišta na okvir od duralumin uglova, pričvršćen za okvir vijcima M6.
![]()
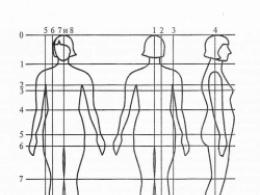
Invalidska kolica model "400", opremljena sa električnim pogonom "Eletran-2" (baterija nije prikazana u prikazu "B") (kliknite za povećanje): 1 - stolica model "400"; 2 upravljačka jedinica motora; 3-prekidač S1 za paljenje motora; 4 - prekidač S2 "naprijed - nazad"; 5 - ručica za upravljanje stolicom; 6 - kabel od otpornika R16; 7 - upravljačka ručka kvačila; 8-električni motor ME272; 9 - frikcioni valjak (liveno gvožđe); 10-motorna baza (čelik); 11-baterija 6ST55; 12-okvir za bateriju (uglovi 20x20 mm); 13 - pogonski točak; 14 ručica za upravljanje motorom; 15 - M6 vijak sa maticom i kontramaticom; 16 - posebna matica za pričvršćivanje frikcionog valjka

Upravljanje (kliknite za povećanje): 1 - ručica upravljača; 2 - čahura; 3 - cijev 4 - ručka; 5 - podloška; 6 - kabel od otpornika R16

Šematski dijagram upravljačke jedinice elektromotora (kliknite za povećanje)
Vučni motor se uključuje pomoću elektronskog regulatora brzine. Treba napomenuti da su tranzistori VT5 i VT6 ugrađeni na hladnjake sa snagom disipacije od najmanje 20 W. Relej K1 - tip 111.3747 - koristi se za uključivanje farova na automobilima tipa Zhiguli. Regulatorna jedinica se uključuje prekidačem S1 tipa A3C-20, koji djeluje kao zaštitni prekidač od preopterećenja. Prekidač S2 tip PT2-10 dizajniran je za promjenu smjera rotacije osovine motora i, shodno tome, obrnuti hod stolice.
Snažni tranzistor VT6 serijski je povezan s motorom. Tranzistorom upravlja generator sastavljen na tranzistorima VT1 i VT2 preko uređaja na DA1. Element za podešavanje je potenciometar R16, koji je ugrađen u upravljačku ručku u ručici upravljača. Kada je tranzistor VT6 potpuno otvoren, kontakti K1.1 releja K1 su „kratki“. Ugao rotacije otpornika R16 pod kojim se to događa određen je otporom otpornika R8, a donji prag za „blago otvaranje“ izlaznog prekidača se postavlja pomoću otpornika R7. Presjek spojnih žica kruga "akumulator - regulator - kontrolna ploča" je najmanje 2 mm2.
Stolica se upravlja pomoću poluge čiji je kraj s navojem pričvršćen na osovinu desnog ili lijevog prednjeg okretnog točka i učvršćen vijkom M6 sa maticom i kontramaticom. Na suprotnom kraju poluge postavljen je otpornik R16 koji regulira brzinu kretanja.

Ploča kontrolera brzine motora (kliknite za povećanje)

Šema ožičenja regulatora brzine elektromotora (kliknite za povećanje)
![]()

Kočioni sistem elektrificirane stolice je standardan, djeluje na lijevi točak. Kako bi se olakšalo korištenje, plastična ručka se uklanja s ručice kočnice i na nju je zavarena čelična šipka promjera 8 mm i dužine oko 300 mm. Sada, ako je potrebno, stolica se može usporiti prilikom kretanja u motornoj verziji.
Ne postoje posebni zahtjevi za rad Eletran-2. Važno je samo pratiti pritisak u gumama, posebno u desnom točku, na koji je pritisnut frikcioni valjak, ako pritisak padne, može skliznuti. Prednji kotači također trebaju biti dobro napuhani - to će smanjiti otpor kotrljanja i poboljšati upravljivost.
Stolica opremljena takvim električnim pogonom kreće se gotovo nečujno i ima dobru upravljivost. Domet od napunjene baterije je 20...25 km. Brzina putovanja je oko 6 km/h. Poluga kvačila vam omogućava da odvojite frikcioni valjak s kotača - u ovom slučaju, stolica se može koristiti u svojoj uobičajenoj verziji, rotirajući kotače ručno.
Zdravo dragi istomišljenici!
U ovom članku želim ponuditi majstorsku klasu o tome kako napraviti kolica za pse s invaliditetom i jednostavno one čije su noge otkazale vlastitim rukama i uz neznatnu cijenu. Problem nedostatka posebne opreme za takve pse (i mačke) postoji, a za životinje se ponekad završava eutanazijom. Ali sada možete sami napraviti ovaj proizvod za rehabilitaciju kućnih ljubimaca u roku od jednog dana.
Naravno, vrlo je poželjno u kući ili garaži imati šiljilo, škripac i bušilicu, ali možete se snaći i sa najprimitivnijim alatima.

Dakle, kolica se sastoje od okvira u obliku slova U, postolja za točkove, pravih točkova i traka za kačenje psa. Na slici ispod brojevi označavaju dimenzije kolica za velikog psa u cm.

Najbolje je napraviti kolica za određenog psa. Da biste to učinili, potrebno je izvršiti antropometrijska mjerenja - visina u grebenu, dužina tijela, koja se mjeri od grudne kosti do ischijalne tuberoze, obim prsa odmah iza prednjih nogu, širina tijela između lopatica i obim butina odmah ispod tijela.

Pa smo izmjerili psa. Okvir u obliku slova U treba da bude na visini srednje linije tela, odnosno na visini od 3/4 visine grebena. Na primjer, ako je visina psa u grebenu 40 cm, onda okvir treba biti na visini od 30 cm od tla. Dužina samog okvira treba da bude veća od dužine tijela psa za četvrtinu, na primjer tijelo psa je 40 cm, zatim je dužina okvira 50 cm. Zadnje noge i rep će se uklopiti u ovu četvrtinu. Da biste izračunali širinu zazora okvira, slobodno dodajte 5-7 cm širini ramena.

Dakle, mentalno smo skicirali parametre budućih kolica. Sada su nam potrebni materijali za proizvodnju. Ovo mogu biti stara kolica za bebe, kolica za kupovinu, krevetić ili bilo šta drugo što ima dva točka i cevaste delove. Posebno su važne one cijevi koje su savijene pod uglom od 90º. Potrebni su za izradu okvira u obliku slova U. Uzimamo gotove kotače, a ostalo - osovine, vijci, matice mogu se napraviti ili na mašini od poznatog tokara (bolje), ili jednostavno možete kupiti vijke potrebna dužina u prodavnici hardvera.


Uradimo to! Prije svega, pomoću bušilice ili pile za nož, rastavljamo dijelove donora kolica. Posebno nam je vrijedna olovka koja ima U obliku. Od njega pravimo okvir. Izmjerili smo širinu psećeg ramena, sada treba u središnjem dijelu prepiliti ručku u obliku slova U i odatle izrezati toliko dužine da pri spajanju polovica dobijemo veličinu koju smo izračunali.

Polovine se mogu spojiti ili pomoću spojne karike okrenute na mašini, ili pomoću komada cijevi ili vijka odgovarajućeg promjera, umetnutog unutar polovica i pričvršćen vijkom ili zakovicom. IN kao poslednje sredstvo okvir možete staviti na ravnu površinu (da bi se održala geometrija) i jednostavno ga postaviti na epoksidni ljepilo (nije preporučljivo).


Konačno je U-okvir spreman! Sada možete raditi na stalcima za točkove i samim točkovima. Od preostalih cijevnih dijelova od donatorskih kolica trebat će nam cijevi čija bi dužina, zajedno s kotačima, trebala biti 5 cm veća od visine okvira koju smo izračunali. Otpilili smo dvije cijevi ove dužine.

Kotače je bolje pričvrstiti na nosače pomoću krajeva napravljenih na tokarilici, koji se stavljaju ili ubacuju u cijevi. Ali možete i bez njih - samo koristite vijke M8-M10 kao osovine kotača potrebna dužina(kupite u trgovini), umetnite ih u prethodno izbušene rupe na krajevima stupova i učvrstite ih epoksidnim ljepilom.


Kotače učvršćujemo za osovine pomoću matice i kontramatice tako da se slobodno okreću i ne klate.

Sada trebamo pričvrstiti stupove na okvir u obliku slova U. Podsjetimo da smo prilikom izračunavanja dužine okvira dodali 1/4 dužini tijela psa. Na udaljenosti ove četvrtine od poprečnog dijela treba pričvrstiti nosače. Izbušimo rupe u okviru pod blagim uglom od oko 5º da bi nosači imali nešto nagiba, što povećava stabilnost kolica. Na malim kolicima, na primjer, za jazavčare, nagib se može izostaviti i rupe se mogu izbušiti okomito.

Na krajevima stubova izbušimo rupe istog promjera na udaljenosti od 5 cm od reza. Istovremeno, osiguravamo da bušenje bude paralelno s osovinama kotača. Bolje je spojiti okvir i police ne samo vijkom, već uz pomoć posebnog dijela koji se može uključiti na mašini. Ali možete i bez stroja, i rezati ga turpijom od komada metalne ili plastične cijevi, ili barem od drveta. Možete bez ovog dijela, ali nije preporučljivo, jer osigurava krutost veze.


Dakle, postolja za točkove su pričvršćena za okvir. Sada moramo ojačati strukturu. Možete izbušiti dodatne rupe u okviru i nosačima i ugraditi učvršćivač.

Ali bolje je ojačati strukturu dodatnim cijevima koje čine simetralu rezultirajućeg jednakokračnog trokuta. Da biste odredili dužinu ovih dijelova, uzmite ravnalo i izmjerite udaljenost od osovina kotača do predviđenih tačaka pričvršćivanja na okvir. Izrežite dvije cijevi ove dužine. Zatim uzimamo čekić i nešto što bi služilo kao nakovanj - na primjer, uteg. Sada poravnamo krajeve cijevi na dužinu od 3-5 cm, pazeći da su ove ravnine paralelne. Zatim s jednog kraja izbušimo rupe za osovine kotača, zatim, stavljajući ovaj kraj na osovinu, bušimo rupe za vijak uparen s okvirom za veću preciznost. Sve! Pričvrstimo ga na okvir i vratimo kotače.


I još jedan mali dodatni detalj, sprečavajući poprečno savijanje okvira. Ovo je šipka između stupova promjera 5 mm, koja se može napraviti od komada žice ili elektrode za zavarivanje. Za njega izbušimo rupe u nosačima i izrežemo navoje na krajevima šipke kako bismo ih pričvrstili maticama s obje strane svake cijevi.

Congratulations!!! Telo kolica je spremno! Sada ostaje samo da prišijete trake za pričvršćivanje psa. Najbolje je uzeti gotovi uprtač željenog obima grudi. Pričvršćuje se pomoću domaćih šarki na prednji dio okvira. Međutim, možete sami sašiti pojas; Zatim moramo osigurati zadnji kraj psa. Sjećate li se kada smo mjerili obim kukova? Dakle, dvije trake sa obje strane kako bi pseće noge pristajale čvrsto, a ne čvrsto, i džemper ispod trbuha. I na kraju, zadnje noge morate pričvrstiti na poprečni dio kolica. Da bismo to učinili, šijemo dvije petlje od pojasa (na primjer, od remena za vuču).

Sve! Kolica su spremna! Pas ima nove noge, opet će trčati stazom!
S poštovanjem, Dmitry "MegaDarni" Ukraintsev.
Zdravo Habr!
Želim vam reći o našem projektu stvaranja terenskog vozila invalidska kolica sa električnim pogonom. U tehničkom smislu, ovo nisu samo kolica, već pravi robot, čak bih rekao i robot transformator.
Kakva bi ova kolica trebala biti?
- Većina invalidnih osoba ne može imati nekoliko električnih invalidskih kolica, tako da bi trebalo da budu što je moguće raznovrsnija. Tako da se po njemu možete kretati kod kuće, na ulici i u šumi i da se možete samostalno penjati stepenicama i penjati na ivičnjak. Ovo takođe vodi do druge tačke.
- Širina kolica nije veća od 650 mm, tako da možete ući u bilo koji otvor ili lift. Dužina ne veća od 1100 mm.
- Safe.
- Jeftino. Mislim da su komentari ovdje nepotrebni.
- Energetski efikasan, jer su baterije skupe.
Glavno pitanje koje zahtijeva radikalne konstruktivne pristupe je, naravno, penjanje uz stepenice. Smatralo se veoma veliki broj mogućnosti implementacije, u rasponu od konvencionalnih kotača velikog promjera s dubokim gazećim slojem do transformirajućeg točka koji se pretvara u uređaj za hodanje. Svugdje je imalo svoje probleme: neka rješenja nisu bila sigurna, neke opcije su bile prikladne samo za jednu vrstu stepenica (određena visina i dubina stepenica) itd. Najbolja opcija ispostavilo se da je pokretač gusenica.
Naša prva cool ideja, osuđena na propast
Ideja je bila sljedeća: 4 motora s reduktorom (pogon na sve kotače), okretno sjedište, okretna stražnja platforma i 4 kotača sa zategnutim gusjenicama. Trik kotača je u tome što na ravnoj površini staza ne dodiruje tlo i, shodno tome, ne stvara vibracije ili dodatno trenje. Kolica se voze na kotačima sa gumenim jastukom. A kada naiđete na prepreku, na primjer u stepenište, staza zahvaća istu prepreku.
Kretanje po stepenicama se izvodi na sljedeći način:
- Okretna ploča se spušta radi lakšeg pristupa stepenicama.
- Nakon trke, zadnja platforma se spušta u liniji sa glavnom platformom. Dakle, ukupna dužina baze gusenice pruža dobru vuču i sigurnost od prevrtanja.
- Prilikom napuštanja stepenica zadnja platforma se spušta kako bi se spriječio iznenadni pad.

Izrada prvog prototipa
Da bismo testirali ideju, krenuli smo u kreiranje prototipa. Odlučili su da za sada ne izmišljaju kontrolnu elektroniku, već da koriste 2 daljinska upravljača iz drugih električnih invalidskih kolica (od kojih svaki upravlja sa 2 motora). Pogoni stolice i stražnje platforme kontrolirani su pomoću tropoložajnih prekidača.Pravljenje kamiona je sasvim druga priča. Osnova domaćih kamiona su zupčasti remeni iz Impreze. Pojasevi su sašiveni. Segmenti su izrezani kao umeci Klinasti remen i ušivenim samoreznim vijcima.

Korišćene su metode bile kolhozne, jer se sve finansiralo iz sopstvenog džepa. Trošak proizvodnje 4 takve staze prema crtežima (čak i u Kini) počinje od 70 hiljada rubalja. (uključujući proizvodnju opreme). Kao rezultat toga, domaće staze bile su dovoljne da se kolica penju uz stepenice bez putnika. Staza je pokidana na spoju zbog nosivosti.
Za izradu prvog prototipa bilo je potrebno oko 80 hiljada rubalja, uključujući i iznajmljivanje garažne radionice.
Na osnovu rezultata testiranja postalo je jasno:
- Na stazi sa ušicama možete se penjati stepenicama. Čak i ako koraci različite veličine i čipovano.
- Ideja okretne stražnje platforme funkcionira.
- Shema kotača je osuđena na neuspjeh.
Električna invalidska kolica – transformator.
Bilo je nekoliko opcija za rješavanje ovog problema:- Napravite mjenjač sa promjenom brzine. Tačnije, 4 mjenjača ili barem 2 (na lijevoj i desnoj strani).
- Gusjenice i kotači se rotiraju različitim pogonima.
- Odvojite bazu na kotačima i na gusjenicama. U tom slučaju, kotač i gusjenica će se pokretati jednim pogonom sa redukcijom na tragu.

Na ravnoj podlozi, osnove staze (donje i zadnje) su u najvišoj poziciji i uopće ne ometaju kretanje kolica. Ako je potrebno savladati prepreku, donja i stražnja platforma se spuštaju i kolica stoje na šinama. Kao rezultat toga, zahvaljujući mehaničkom prijenosu od osovine motora do pogonske remenice gusjenice i razlike u promjerima kotača i remenice, bilo je moguće postići projektnu deseterostruku razliku u brzinama i zakretnim momentima.
Implementacija ideje u hardveru
Ovaj put smo izradi prototipa pristupili temeljitije: naručili smo potrebne staze i pogone iz Nebeskog carstva i nabavili elektroniku. Mehanička obrada, lasersko rezanje i savijanje naručeni su iz novosibirskih preduzeća. Naravno, montažu i zavarivanje smo obavili sami. Svi radovi, kao u klasičnom startupu, izvedeni su u garažnoj radionici.Upravljački sistem se sastoji od daljinskog upravljača i izvršnog modula koji komuniciraju preko Bluetooth-a. Bežični daljinski upravljač je posebno neophodan u slučajevima kada osoba s invaliditetom ne može sama upravljati džojstikom, a kolicima upravlja osoba u pratnji. Kada se penje uz stepenice, pratilac ne mora posegnuti za ručkom stolice za džojstik, držeći daljinski upravljač u ruci, on vizualno kontroliše kretanje.
Automatski sistem za održavanje horizontalnog položaja stolice baziran je na akcelerometru. Pošto sistem nije visokodinamičan, možete bez žiroskopa i smanjiti matematičke proračune. Na mehanizmima za spuštanje i podizanje donje i zadnje platforme nalaze se senzori povratne informacije. Informacije o položaju platformi se prenose na konzolu. Sistem se napaja gel baterijama od 24 V (u budućim verzijama koristićemo litijum-jonske).
Ispitivanja su obavljena na stepenicama višespratnice:
Ima još dosta problema koje treba riješiti. Ali jedno je sigurno – radi! Podneta je prijava za patent za razvoj sistema gusenica na točkovima sa platformama za spuštanje. Naše daljnje akcije usmjerene su na poboljšanje elektronike, povećanje obrtnog momenta na gusjenicama, promjenu profila gusjenice radi boljeg zahvatanja i, naravno, stvaranje prezentabilnog izgleda proizvoda.
Napravili smo video o važnosti ovog razvoja:
Sada možemo dati osobi sa invaliditetom slobodu kretanja. Stepenice kuće, prodavnice, bioskopa, par stepenica na putu do prijatelja ili devojke će im se činiti kao sitnice.
Predloženi projekat „Sistem pogona u invalidskim kolicima koji koristi mehanizam poluge koji se može ukloniti kao sredstvo za značajno olakšavanje rada aktivnih invalidskih kolica“ predviđa stvaranje jednostavnog za proizvodnju i jeftinog uređaja za osobe sa invaliditetom invalidnosti mišićno-koštanog sistema, kao i za mnoge starije osobe koje ne spadaju u ovu kategoriju, ali se teško kreću. Stoga su invalidska kolica za ovaj krug potrošača nešto od suštinskog značaja. Osobama sa invaliditetom su potrebna različita kolica, koja se razlikuju po namjeni. Mogu se podijeliti u četiri glavne kategorije - zatvoreni, aktivni, hodajući i sportski. Najpopularnija su aktivna invalidska kolica koja se pokreću ručno rotirajući točkove.
Međutim, pri kretanju na velike udaljenosti, kao i pri kretanju preko područja gdje se ugao puta često mijenja, kao i pri skretanju, korisnik invalidskih kolica mora stalno mijenjati silu i smjer primijenjenih sila na obruču točka. Sve to dovodi do povećanja potrošnje energije, umor, a često i do ozljeda ramenog aparata u vidu kroničnih uganuća i iščašenja tetiva.
Kako bi se eliminirali svi ovi nedostaci pri korištenju aktivnih invalidskih kolica, predlaže se sistem uklonjivih mijehova poluge
Sistem je dizajniran da pomogne korisnicima u invalidskim kolicima da se osjećaju neovisniji i da im pomogne da hodaju na duže udaljenosti. Ovaj sistem daje veću mobilnost pri upravljanju invalidskim kolicima.
Sistem vam omogućava da aktivna invalidska kolica pretvorite u invalidska kolica za hodanje. A to je veoma važno za glavne potrošače – osobe sa invaliditetom koji nemaju finansijske mogućnosti da imaju nekoliko tipova invalidskih kolica (pokretna ili električna).
Predloženi sistem je uređaj od dva mehanizma s polugom koji se mogu skinuti, postavljeni ili na rubove točkova ili direktno na točkove invalidskih kolica, koji, kada su reverzibilni, kretanje napred(zbog kretanja ruku korisnika), kotači kolica se pokreću. Štaviše, uz povratno kretanje poluga, nema kretanja u praznom hodu svojstvenog sličnim stranim sistemima. Ovo se može postići upotrebom mehanizma za pretvaranje povratnog kretanja u rotacijsko kretanje. Istovremeno, količina sile koja se prenosi od onih koji izvode oscilatorna kretanja Poluge (naprijed i naprijed) na kotačima kolica mogu se podesiti u širokom rasponu.
Sistem se može instalirati na skoro svaki model aktivnih invalidskih kolica, pokretanih rotacijom točkova ručno.
Navedene prednosti predloženog sistema pogona u invalidskim kolicima u poređenju sa postojećim gore navedenim modelima inostrane proizvodnje značajno će povećati mobilnost osoba sa invaliditetom, znatno olakšati njihov život, što će proširiti njihove životne mogućnosti.
Dizajn ne sadrži skupe materijale i jednostavan je za proizvodnju i montažu.
Priložena fotografija pokazuje trenutni model izumljeni mehanizam je osnova pogonskog sistema.